7月7日,首屆“禾多未來日”活動在武漢圓滿舉行。本屆活動以“A Robotic State of Mind”為主題,邀請到國內外機器人領域的著名學者與行業領袖,為武漢高校師生帶來移動機器人領域最前沿的技術理論知識和科技研發應用,探討如何應對移動機器人技術面臨的產業化挑戰。禾多未來日由自動駕駛量產解決方案先行者——禾多科技主辦,旨在促進學術和產業的交流和合作。
據悉,多名享譽國內外的學術界、產業界的知名專家出席了本次活動,包括:中國工程院院士、清華大學自動化系教授、生命科學學院客座教授戴瓊海院士,美國佐治亞理工學院終身教授、禾多科技首席3D視覺科學家Frank Dellaert,香港科技大學電子與計算機工程系助理教授沈劭劼,韓國科學技術院機器人與土木環境工程學院助理教授Ayoung Kim,上海科技大學信息科學與技術學院助理教授及研究員Laurent Kneip,浙江大學教授、國家優秀青年科學基金獲得者章國鋒,清華大學計算機系、智能技術與系統國家重點實驗室特別研究員劉華平,阿里巴巴人工智能實驗室研發總監李名楊,TüV南德意志大中華集團、南德認證檢測(中國)有限公司大中華區經理趙欣等。
主題演講精彩紛呈,共話移動機器人新趨勢
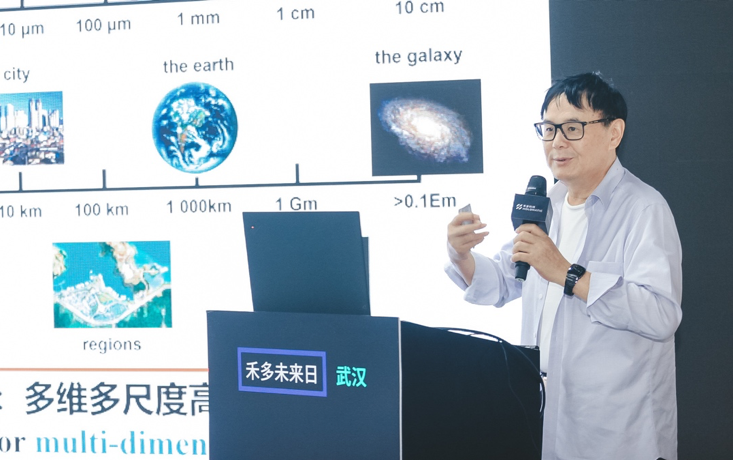 中國工程院院士,清華大學自動化系教授、生命科學學院客座教授戴瓊海院士
中國工程院院士,清華大學自動化系教授、生命科學學院客座教授戴瓊海院士
中國工程院院士、清華大學自動化系教授、生命科學學院客座教授戴瓊海院士以“探索人工智能新方向——光場視覺”為題發表了演講。目前廣泛應用于智能系統的視覺成像單元大多數基于單目或雙目,難以超越人眼所具有的多維多尺度成像能力,在時間、空間、角度、光譜、動態范圍等多個維度的成像能力受限,從而限制了諸如L5級別自動駕駛等移動機器人研究和應用的開展。戴院士及團隊深耕計算攝像學領域多年,其研究的第三代非結構化多尺度相機陣列能夠做到集中分布式的標定,突破景深與空間分辨率之間的矛盾,實現360度、遠距離、高分辨率、動態深度的計算,真正做到“看得全、看得清、看得見”。同時,戴院士及其團隊還介紹了其正在研究的基于光電計算的第四代視覺系統,通過光信號在材料傳輸過程中的衍射和干涉進行計算,一旦應用在自動駕駛中,能夠很好地應對自動駕駛大量場景下的計算功耗問題。

美國佐治亞理工學院終身教授、禾多科技首席3D視覺科學家Frank Dellaert
美國佐治亞理工學院終身教授、禾多科技首席3D視覺科學家Frank Dellaert以“基于因子圖和自動微分法的推論在機器人及計算機視覺中的廣泛應用“為題發表了演講。在機器人學和計算機視覺中,同步定位與建圖(Simultaneous Localization Mapping,簡稱SLAM)和運動結構 (Structure from Motion,簡稱SFM)是重要而又緊密相關的問題。Frank Dellaert教授回顧了因子圖(Graph Factor)在SLAM、SFM以及機器人和視覺領域的應用,展示了因子圖批處理和增量處理算法,以及在復雜的軌跡處理中的巨大優勢。

香港科技大學電子與計算機工程系助理教授沈劭劼
香港科技大學電子與計算機工程系助理教授沈劭劼教授以“復雜環境中的三維視覺感知——狀態估計、三維重建和動態目標感知”為題發表了演講,他和他的團隊致力于讓無人機在低成本、小體積的前提下,實現在復雜的環境中自主運行。同時,他們也在研究自動駕駛中包括姿態估計、動態物體的檢測與跟蹤、車輛動作預測以及路徑規劃等課題。

韓國科學技術院機器人與土木環境工程學院助理教授Ayoung Kim
韓國科學技術院機器人與土木環境工程學院助理教授Ayoung Kim以“城市環境中基于感知的SLAM技術”為題發表了演講。Kim教授及其團隊進行了基于激光雷達和攝像頭的SLAM算法研究,致力于提高無人駕駛汽車在城市復雜環境中安全行駛的能力。他們通過2D和3D激光雷達進行測量和地圖構建,形成復雜的城市地圖數據。同時,也在研究如何更好地對物體進行外部標定,以及基于相機激光雷達和熱激光雷達的多模態SLAM技術。

上海科技大學信息科學與技術學院助理教授及研究員Laurent Kneip
上海科技大學信息科學與技術學院助理教授及研究員Laurent Kneip以“三維空間人工智能:更高級、嵌入式表達的SLAM技術”為題發表了演講。他認為,三維空間人工智能(Spatial AI)是一種更高層次的表達法,它結合了幾何信息,語義信息和目標對象信息來理解場景。它不再重建部分環境,而是利用語義信息(比如先驗形狀)重建目標物體,是一種真正由數據驅動的SLAM架構。
浙江大學教授、國家優秀青年科學基金獲得者章國鋒
浙江大學教授、國家優秀青年科學基金獲得者章國鋒教授以“視覺SLAM技術和AR應用”為題發表演講。他認為,基于單一傳感器的SLAM會有局限性,所以未來多傳感器融合是必然的趨勢,比如手機目前裝有相機和IMU,而移動機器人可以有更多的傳感器,像自動駕駛系統里一般都應用到了相機、LiDAR、GPS、IMU、里程計等傳感器。每個傳感器都有各自的優點和缺點,只使用一種傳感器必然有很大的局限性,而通過SLAM技術融合多種傳感器能夠達到穩定、高精度的定位。章教授及其團隊目前主要的工作主要是SLAM在AR、VR上的應用,接下來也希望能在機器人、自動駕駛方向進行更多的研究。

清華大學計算機系、智能技術與系統國家重點實驗室特別研究員劉華平
清華大學計算機系、智能技術與系統國家重點實驗室特別研究員劉華平以“多模態主動環境感知深度強化學習方法”為題發表了演講。他研究的對象主要是應用機器人和操作機器人。在實際場景中,機器人主要通過視覺、聽覺、觸覺這三種綜合模態進行感知。而機器人多模態信息融合的本質困難在于,視-聽-觸覺多模態數據具有不同的表示形式和感知范圍,但卻不具有一一對應的匹配特性。如何針對這種異構的多模態數據去實現融合,以及引入主動感知后,如何把感知和動作這兩個回路高度非線性地融合刻畫出來,是劉華平研究員及其團隊主要在解決的問題。
產學研跨界合作,共同推進移動機器人產業落地
活動最后,特設圓桌討論環節,圍繞“移動機器人技術的產業化挑戰”的話題展開討論。討論嘉賓包括:浙江大學教授章國鋒、佐治亞理工學院終身教授Frank Dellaert,阿里巴巴人工智能實驗室研發總監李名楊,禾多科技創始人兼CEO倪凱,TüV南德意志大中華集團,南德認證檢測(中國)有限公司大中華區經理趙欣。

嘉賓圍繞“移動機器人技術的產業化挑戰”的話題展開討論
對于目前移動機器人的技術進展以及產業化程度,李名楊表示,目前產業化機器人大多只是完成單一的任務,下一步可以把不同的技術放在一起,實現機器人多功能化。
Frank Dellaert教授則認為,衡量移動機器人技術的成熟度要看具體的產品和場景,比如當無人機的任務是跟隨用戶進行拍攝,目前的技術對于該應用場景而言就是成熟的;而談及自動駕駛,想要保證安全可靠并讓消費者為技術買單,對技術成熟性的標準就會非常高。
倪凱進一步提出了軟硬件碎片化問題。在不同的垂直領域,硬件的碎片化導致了算法的碎片化,每個做機器人的機構都會研究自有的機器人執行機構,在此基礎上大家做SLAM、感知、決策也非常不一樣。
趙欣則認為,要實現產業化,必須滿足需求、商業模式、產業政策和標準四個前提。傳統的工業機器人的標準更多針對機械類,但是移動機器人更多是軟件方面,軟件質量、軟件安全等都是需要考慮的因素。
移動機器人是一門綜合的交叉學科,涉及到了計算機科學、機械工程、電子工程等多門學科,集軟硬件于一體,橫跨產學研領域。章國鋒教授直言,依靠高校的課題組去直接做一個產品級的東西是非常困難的,要將技術成果快速落地,需要與企業合作。產學研融合,需要大家發揮好各自的優勢,高校和科研院所擅長做理論和前沿探索性的研究,企業則更了解實際應用需求,而且工程開發能力通常比較強,雙方緊密合作,甚至在一起工作,會產生1+1大于2的效果,能夠實現技術的快速落地。
據了解,本次活動的主辦方禾多科技創立于2017年6月,公司基于前沿人工智能技術和汽車工業技術研發自動駕駛系統,擁有全棧研發能力,具備從車輛線控、底層多傳感器技術到上層自動駕駛核心算法模塊的完整布局。禾多科技以促進自動駕駛技術產業化落地為目標,目前聚焦高速公路和代客泊車兩大應用場景,打造由本地數據驅動的自動駕駛量產解決方案。禾多于年初設立武漢研究院,并已與武漢大學等高校展開合作,針對自動駕駛相關課題進行前瞻研究。